四川纳卡检测服务有限公司
 第8年
第8年

 第8年
第8年 
--
第8年

来源:四川纳卡检测服务有限公司 时间:2024-11-26 03:57:51 [举报]
机床检测的类型有哪些?
数控车床、数控镗床、数控铣床、数控钻床、数控磨床、数控拉床、数控插床、数控刨床、数控锯床、齿轮加工机床、螺纹加
工机床、加工中心等金属切机床,及各类机床、滚珠丝杠等。
1定位精度的检测
检测机床的定位精度,常用标准有两种:
●德国VDI/DGQ3441标准(机床运行精度和定位精度的统计方法)。
●美国AMT标准(美国机械制造技术协会制定)。
用两个标准,测量数据的整理均采用数理统计方法。即沿平行于坐标轴的某
一测 量轴线选取任意几个定位点(- -般为5~15个),然后对每个定位点重复进行
多次定位(一般为5~13次)。可单向趋近定位点,也可以从两个方向分别趋近,
然后对测量数据进行统计处理,求出算术平均值。进而求出平均值偏差、标准差、
分散度。分散度代表重复定位精度,它和平均值偏差一起构成定位精度, 两者之
和是在任意两点间定位时可能达到的大定位偏差。
由于被测坐标轴长度不尽相同,因而其定位精度的线性允差的给定方式不应
是单一的,而应有所区别。国标GB10931-89数字控制机床位置精度的评定方法
中规定,轴线定位精度线性允差的给定方式主要有以下几种:
●在全行程上规定允差;
, 根据被测对象长度分段规定允差;
●用局部公差方式规定允差;
既规定局部公差,同时也规定全行程允差。
机器人检测有哪些?
1.功能试验:包括按钮、展现、联锁,各轴动作、指令动作等;
2.安全试验:接地电阻和守护接地、绝缘电阻、介电强度等;
3.环境条件试验:气温极限试验、气温下限试验、恒定湿热试验、振动试验;
4.动力源试验:功率、压力波动、温升等;
5.运输性能:在三级马路上实际运输200km;
6.可靠性:可靠性验证试验方法由业务标准来规定。
服务机器人的EMC专属标准:
机器人领域的小伙伴知道CR认证,可之前申请CR认证的EMC测试标准应用的是GB/T《电磁兼容通 用标准居住、商业和轻I业环境中的抗扰度》和GB《电磁兼容通用标准居住、 商业和轻I业环境中的发射》, 这两
份标准是电磁兼容领域根据应用环境汤所给出限值的通用性标准,对于机器人的复杂运行工况,可以说,两份标准不在线。
新发布的GB/T 37284-2019《服务机器人电磁兼容通用标准发射要求和限值》和GB/T 37283-2019《服务机器人电磁兼容通用标准抗扰度要求和限值》两份标准正是为了解决测试模式和测试状态的一致性问题,
适用范围是适用于各类服务机器人,要包括个人家用服务机器人和公共服务机器人。特种机器人可以参照使用本标准。
新发布的GB/T 37284-2019《服务机器人电磁兼容通用标准发射要求和限值》和GB/T37283-2019《服务机器人电磁兼容通用标准抗扰度要求和限值》两份标准正是为了解决测试模式和测试状态的一致性问题 ,
适用范围是适用于各类服务机器人,要包括个人家用服务机器人和公共服务机器人。特种机器人可以参照使用本标准。
根据固定式和移动式区分测试状态和测试项目
1、发射标准
a)固定式服务机器人:
应在正常工作模式下进行全部项目的测试。
b)移动服务机器人:
应在充电模式、工作模式及回充寻找模式下分别进行测试,测试项目为:
1)充电模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰;
2)工作模式(本体) : 辐射骚扰;
3)回充寻找模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰。
2、抗扰度标准:
1 )移动服务机器人:
应在充电模式、工作模式和回充寻找模式状态下分别进行测试,测试项目为: .
--充电模式(机器人本体连接充电器) : 适用的全部测试项目;
--回充寻找模式:适用的全部测试项目
--工作模式(机器人本体) :工频磁场、射频电磁场、静电放电。
工作模式测试状态:服务机器人应在以绝缘支架支撑底部确保机器人悬空的状态下,以60% ~ 80%的高速度或典型速度进行试验,选择典型速度。
2 )固定式服务机器人: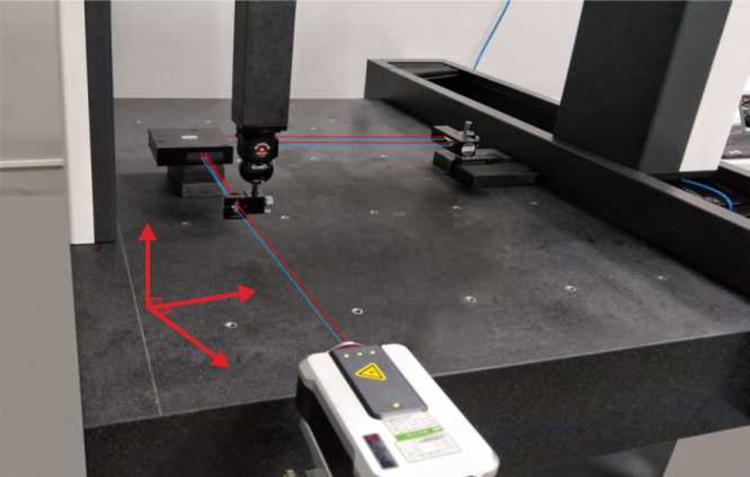
机器人检测的背景技术:
在机器人的研发、制造上,尤其是工业机器人,我国与工业发达国家的差距较大,主
要表现在关键零部件基础薄弱、可靠性和精度不高。
重复定位精度作为机器人的一项重要的技术参数,其测量是机器人出厂前的必检项目
之一。
目前,测量机器人重复定位精度检测设备主要有激光跟踪仪和三坐标测量仪。其中,
激光跟踪仪测量实施过程简单、测量精度高,但是设备昂贵, 不是大部分中小企业所
负担得起的。另外,测量过程中,激光需要一-直跟踪机器人末端的靶球 ,机器人运动
速度不能很高,否则容易出现断光。而三坐标测量仪测量实施过程中,机器人与三坐
标测量仪之间需要进行动作协调,否则容易造成干涉,损坏测量仪,操作比较繁琐,
设备也比较昂贵。
标签:机器人精度检测,精度检测费用,贵州精度检测,影像测试仪精度检测





